Why?

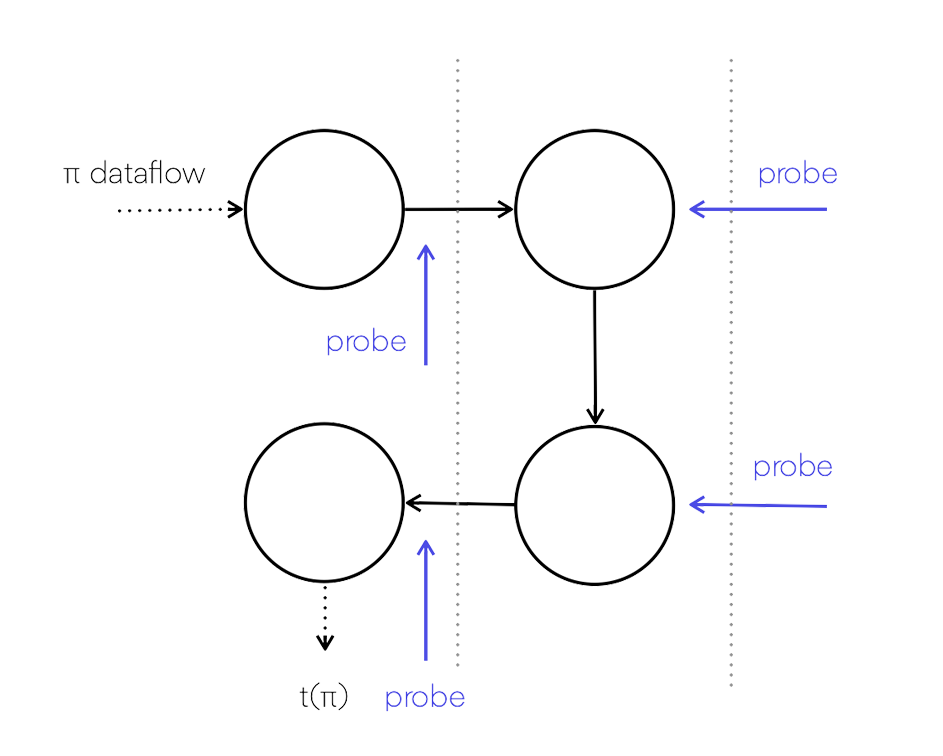
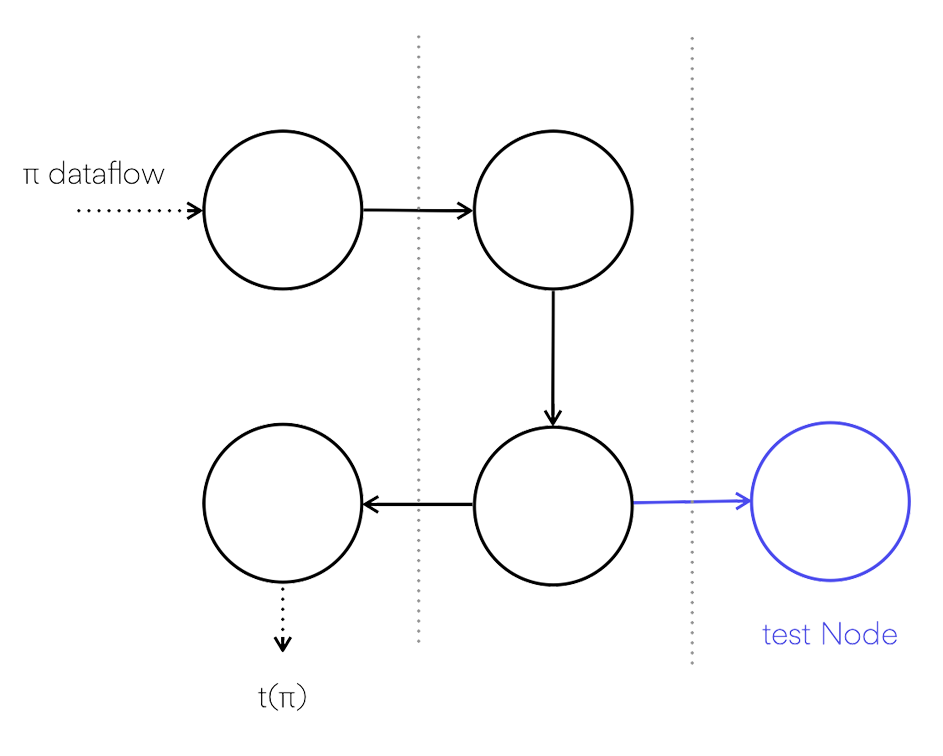
Robot behaviors take the form of computational graphs, with data flowing between computation Nodes, across physical networks (communication buses) and while mapping to underlying sensors and actuators. The popular choice to build these computational graphs
for robots these days is the Robot Operating System (ROS), a framework for robot application development. ROS enables you to build computational graphs and create robot behaviors by providing libraries, a communication infrastructure,
drivers and tools to put it all together. Most companies building real robots today use ROS or similar event-driven software frameworks. ROS is thereby the common language in robotics, with several hundreds of companies and thousands
of developers using it everyday. ROS 2 was redesigned from the ground up to address some of the challenges in ROS and solves many of the problems in building reliable robotics systems.
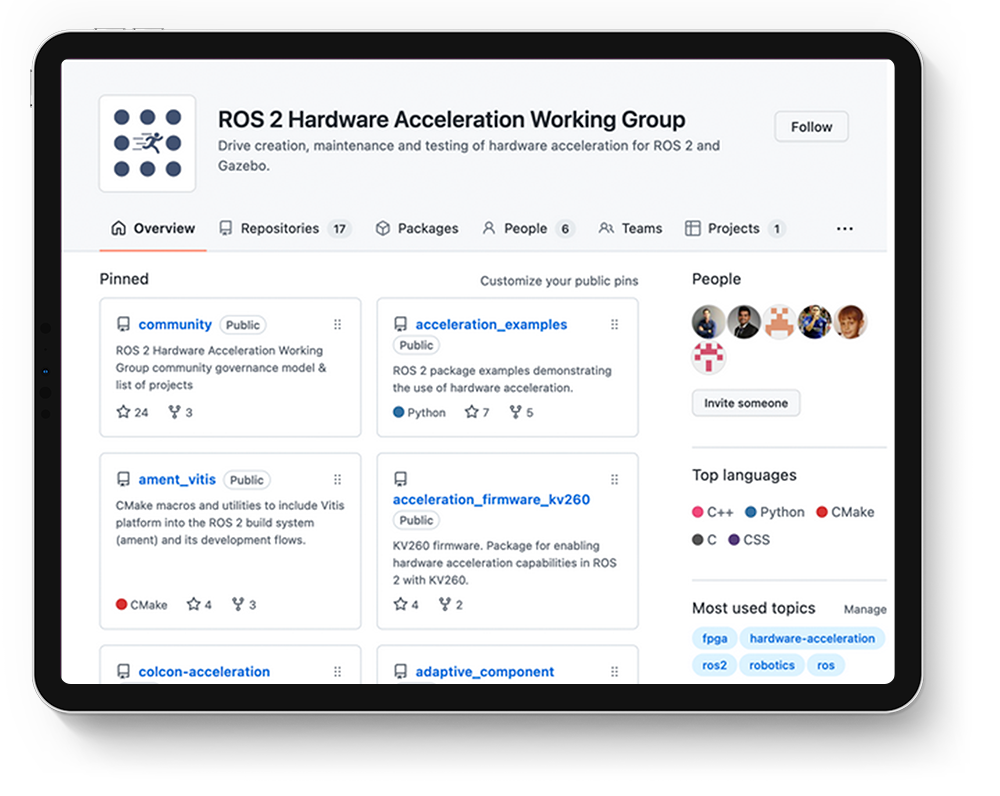
ROS 2 presents a modern and popular framework for robot application development most silicon vendor solutions support, and with a variety of modular packages, each implementing a different robotics feature that simplifies
performance benchmarking in robotics.
Which companies are using ROS?
More about
ROS